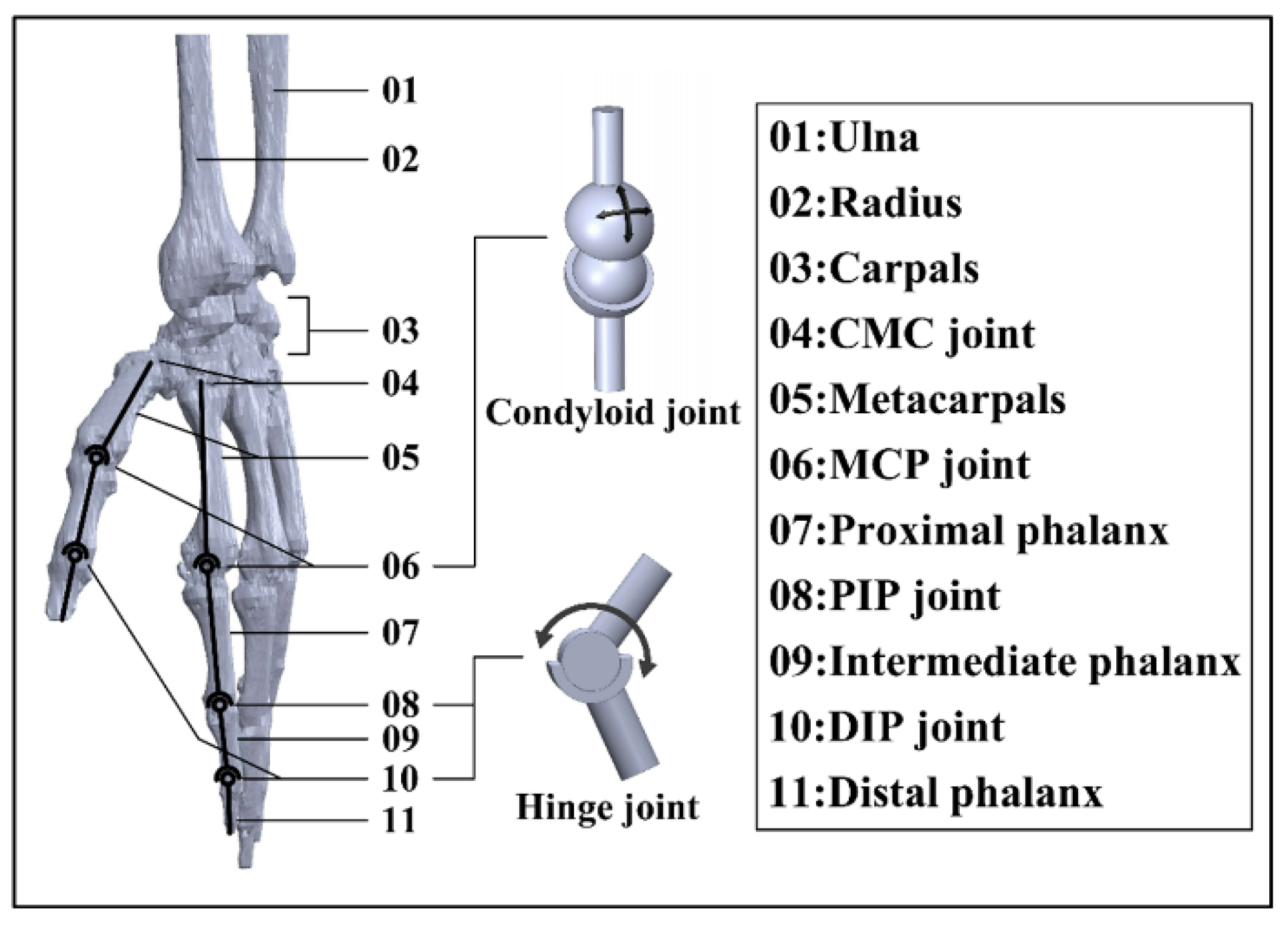
Kinematic model of a hand: each finger has 3 joints with 4 DoF : index

Full article: Kinematic analysis of four-fingered tendon actuated robotic hand

Kinematic schematic of various chains in the hand exoskeleton system.
Bioengineering, Free Full-Text

Robotics, Free Full-Text

Validation of two-dimensional video-based inference of finger kinematics with pose estimation
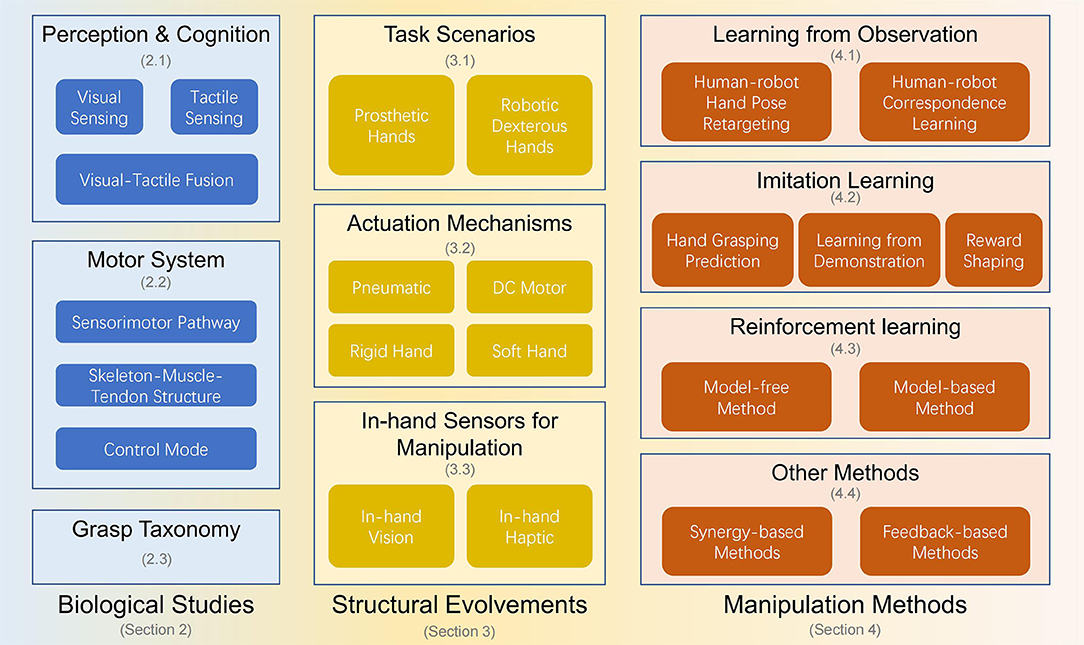
Frontiers A Survey of Multifingered Robotic Manipulation: Biological Results, Structural Evolvements, and Learning Methods

Kinematic synergies of hand grasps: a comprehensive study on a large publicly available dataset, Journal of NeuroEngineering and Rehabilitation

PDF) Design Requirements of Generic Hand Exoskeletons and Survey of Hand Exoskeletons for Rehabilitation, Assistive or Haptic Use
Frontiers A user-friendly automatic toolbox for hand kinematic analysis, clinical assessment and postural synergies extraction